无人叉车的避障技术通常依赖于多种传感器和先进的算法,确保其在复杂环境中安全、高效地运行。以下是无人叉车避障机制的结构化说明:
1. 传感器融合:
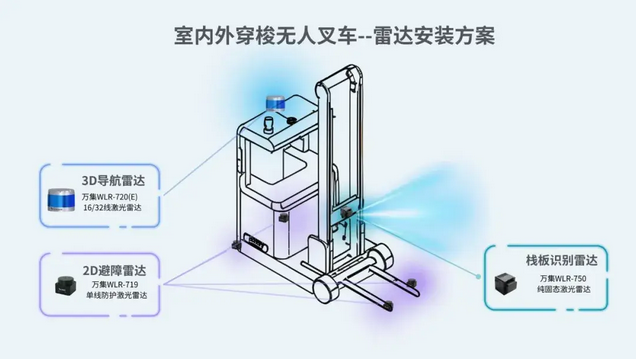
- 激光雷达(LiDAR):提供360度环境扫描,创建高精度的点云图,用于检测障碍物。
- 摄像头:视觉传感器可以识别颜色、形状和标记,辅助避障和导航。
- 超声波传感器:用于近距离障碍物检测,尤其是在狭小空间中。
- 红外传感器:检测热源,如人员,增加安全性。
2. 实时定位与地图构建(SLAM):
- 结合传感器数据,无人叉车实时构建和更新环境地图,确保精确的定位和路径规划。
3. 路径规划与决策:
- 算法决策:使用A、Dijkstra等算法规划最优路径,同时考虑动态障碍物。
- 动态避障:实时调整路径,避开突然出现或移动的障碍物。
4. 安全系统:
- 紧急停止:遇到不可预测障碍时,自动触发紧急停止机制。
- 速度控制:根据环境复杂度调整行驶速度,确保安全。
5. 软件与算法:
- 深度学习:用于识别复杂场景和优化决策。
- 避障算法:结合多种传感器数据,进行障碍物预测和规避。
无人叉车能够实现智能避障,确保在仓库、工厂等环境中高效、安全地执行任务。